




UGCS ENTERPRISE licencia permanente
2.649,90 €
la gente está viendo esto ahora mismo
UGCS ENTERPRISE licencia permanente
Sólo100 artículo(s)¡en stock!
Llévatelo por 0€ en 0 meses *
- TIN: 0% / TAE: 0%
- Número de cuotas: cuotas
- Cuota mensual: 0€/mes
- Importe total adeudado y precio total a plazos: 0€
- Coste total de crédito e intereses: 0€

Pago seguro garantizado
- Envío gratuito en pedidos superiores a 600€
- Entrega en : 1-2 Días Laborables Envíos y devoluciones
![]()
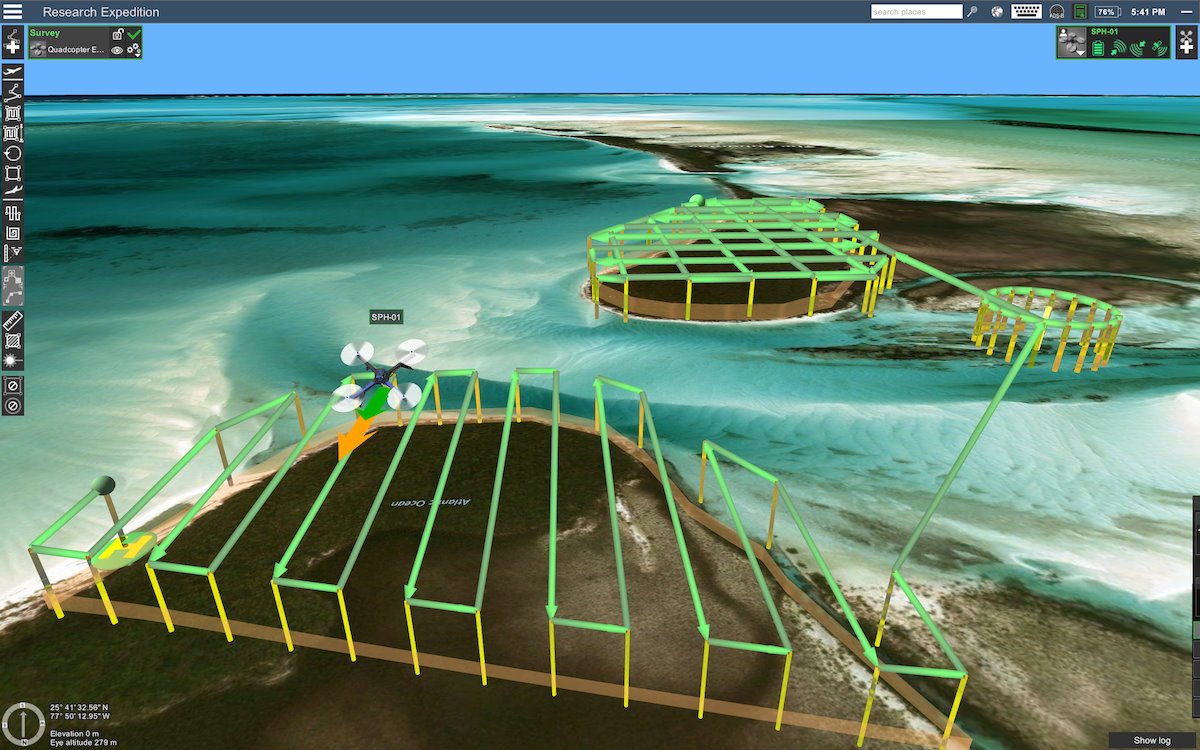
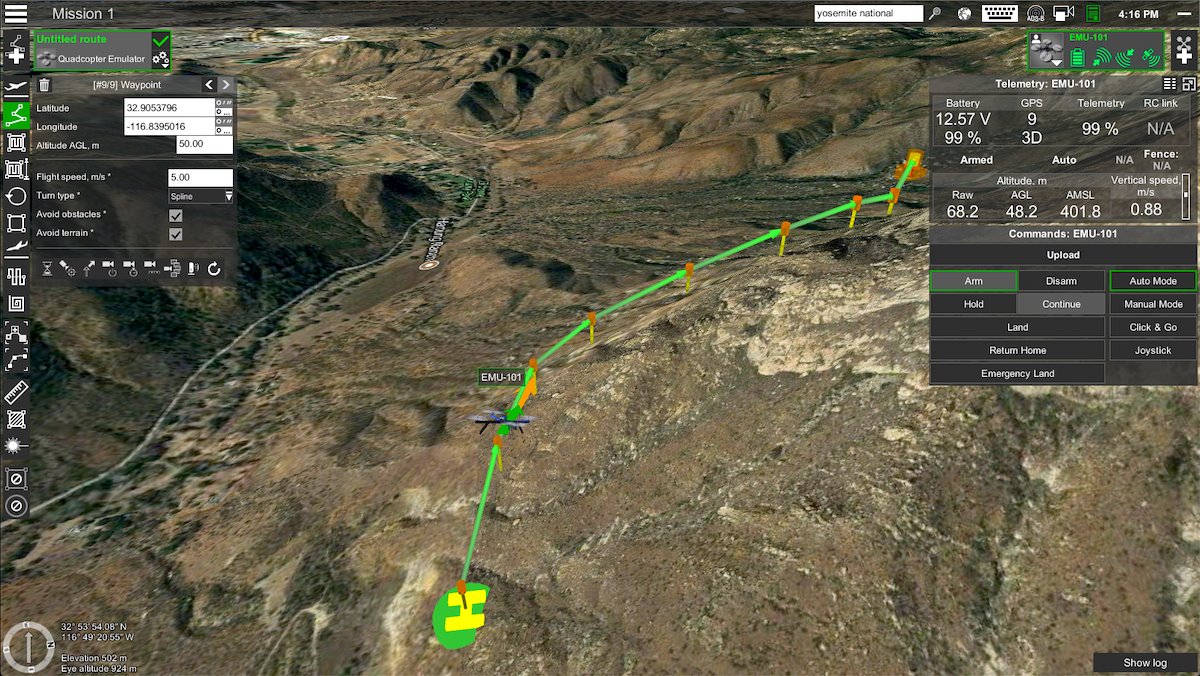
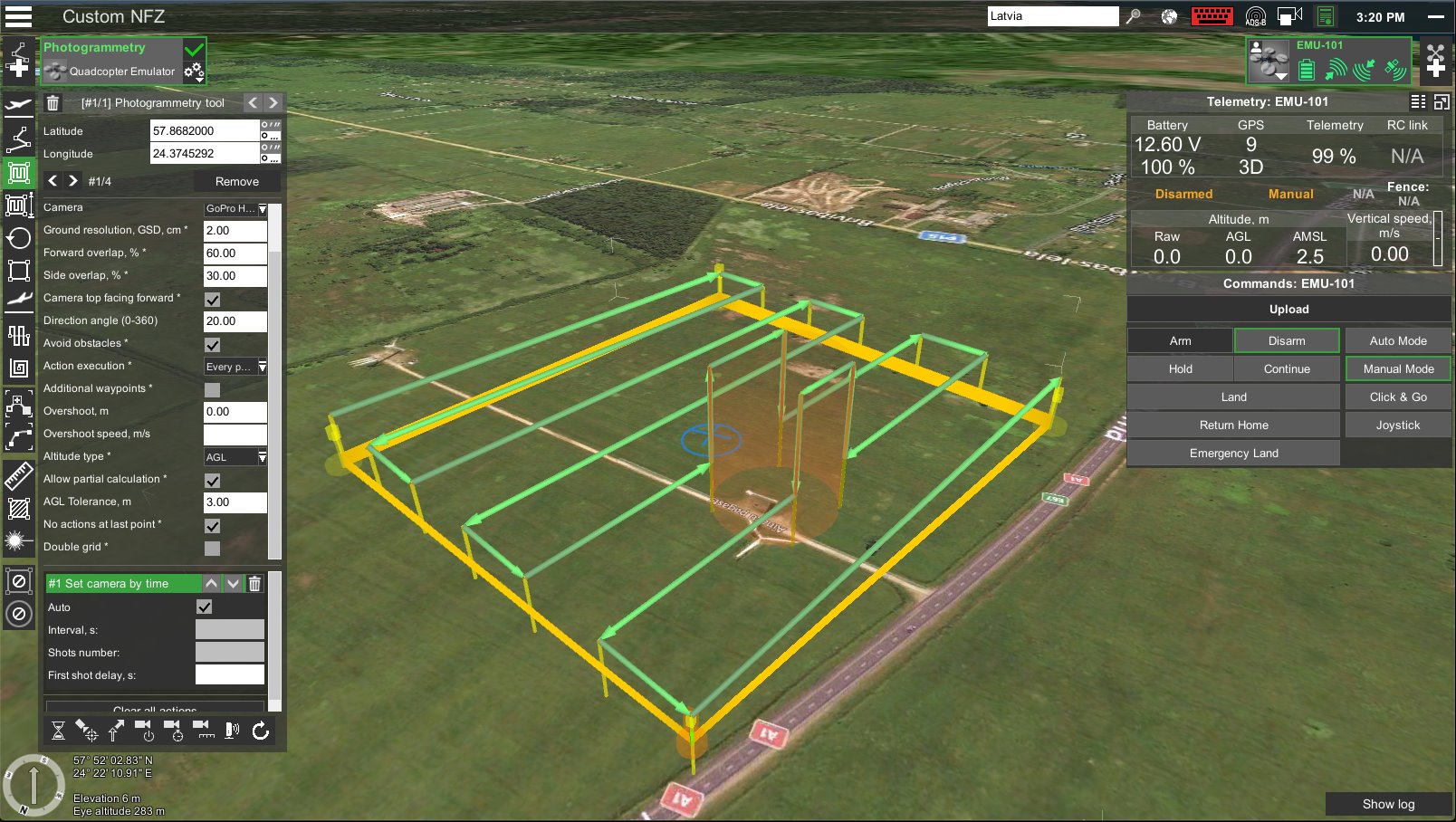
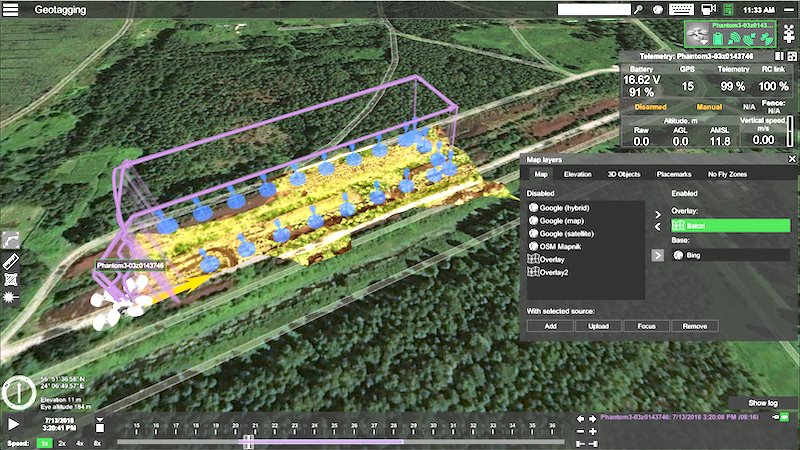
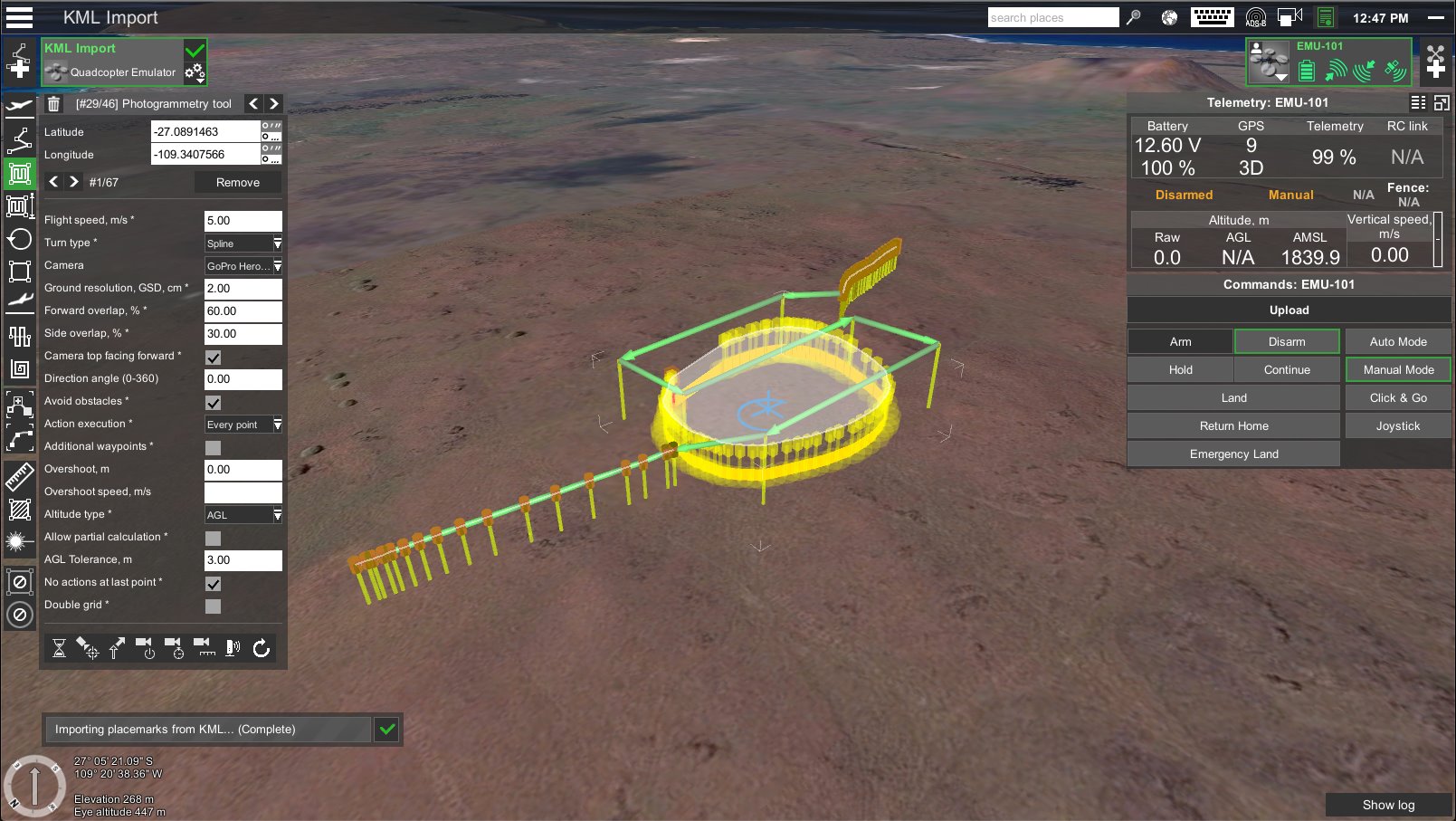
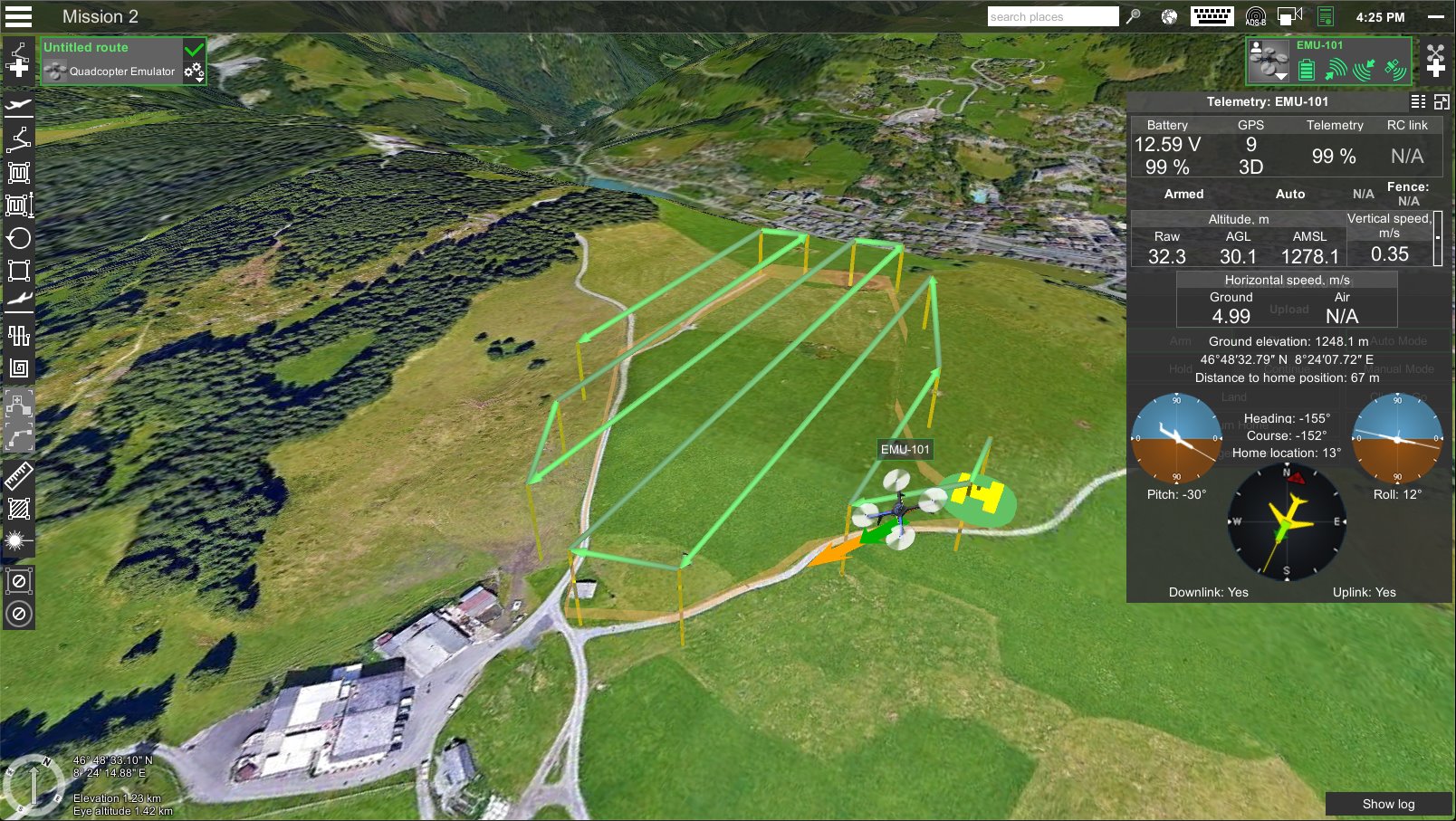
- Herramientas de escaneo de waypoints, lineales, circulares, perimetrales y de área
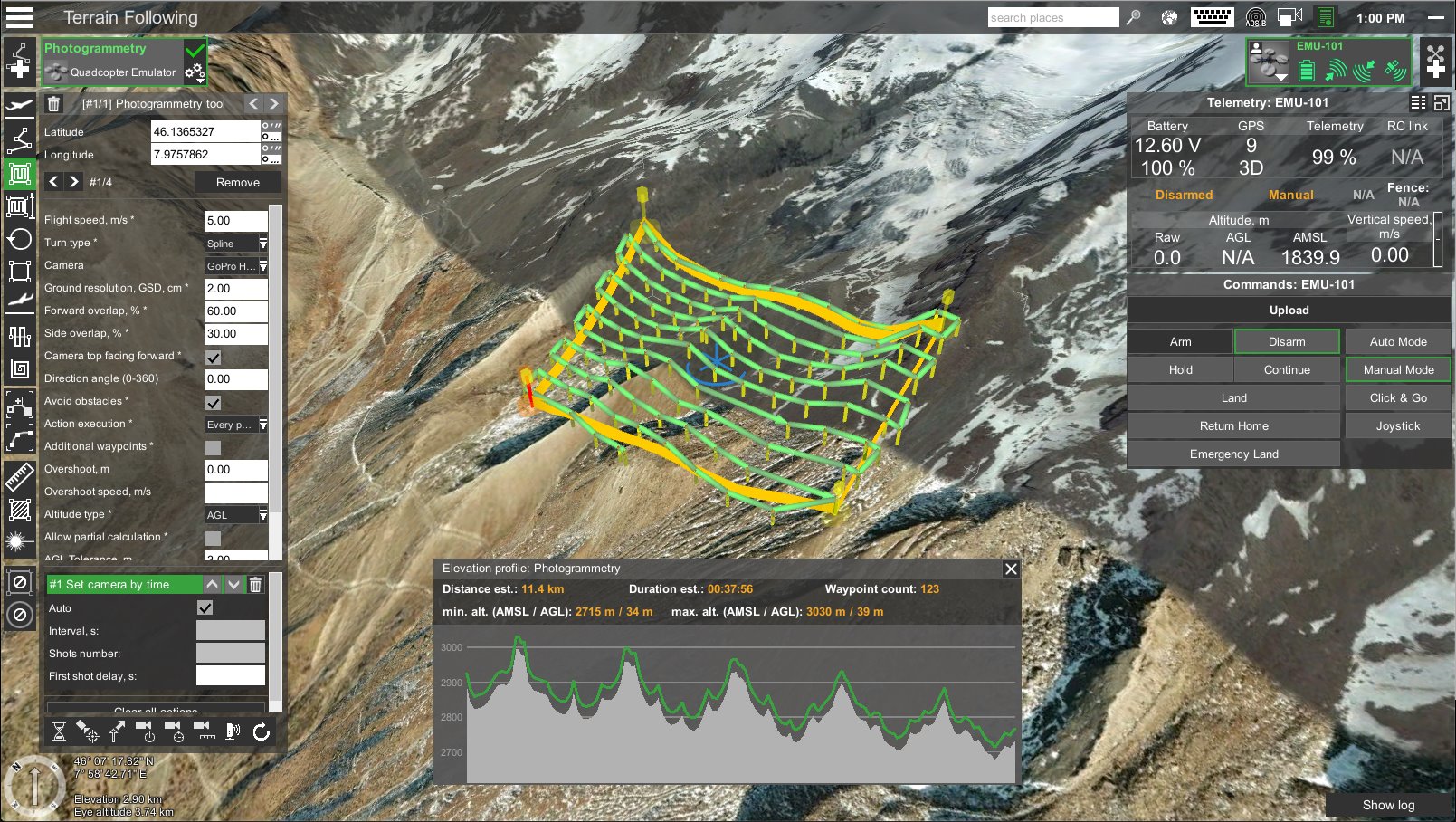
- Fotogrametría automática, escaneo vertical (fachada), mapeo de pasillos, herramientas SAR
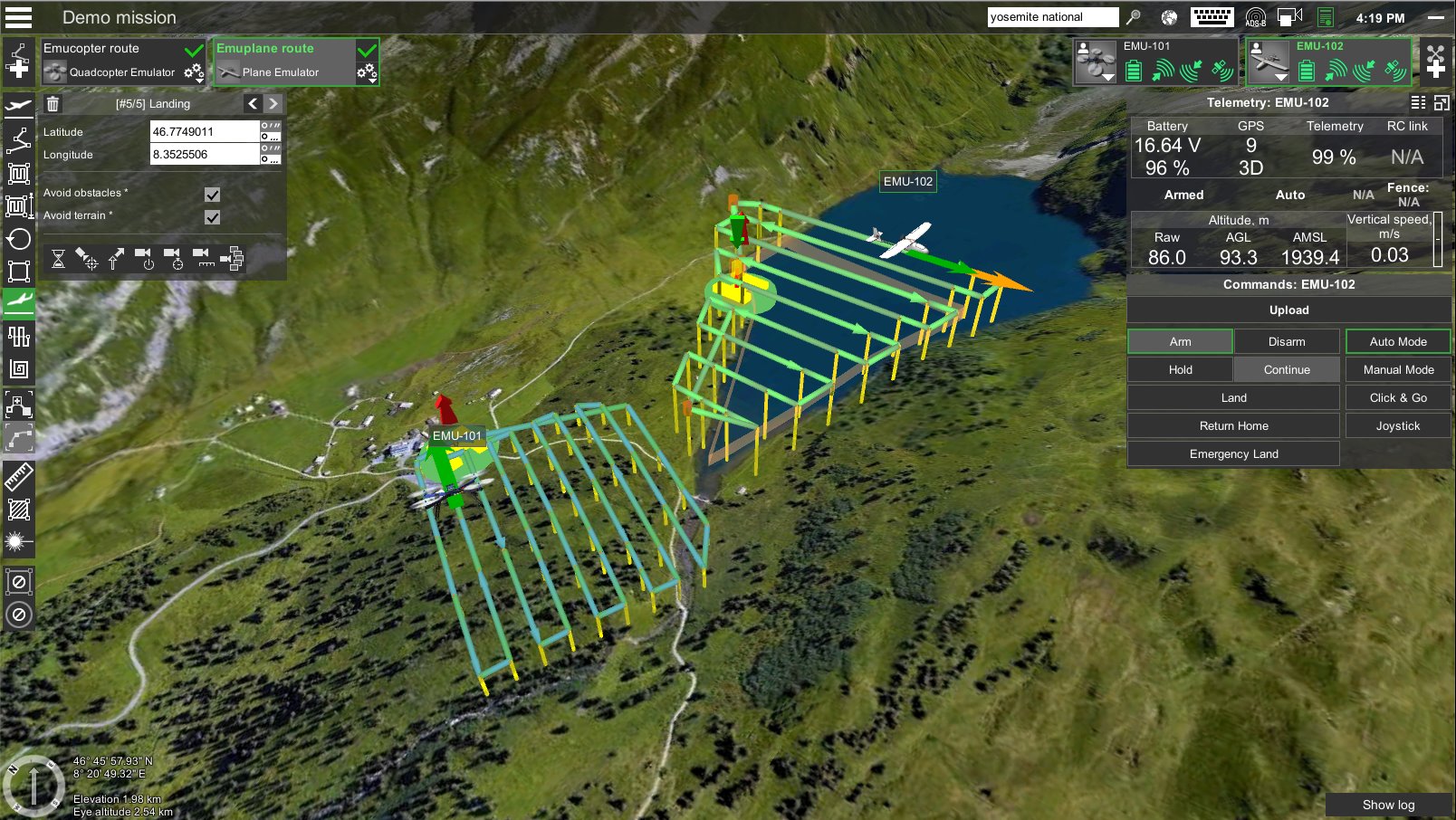
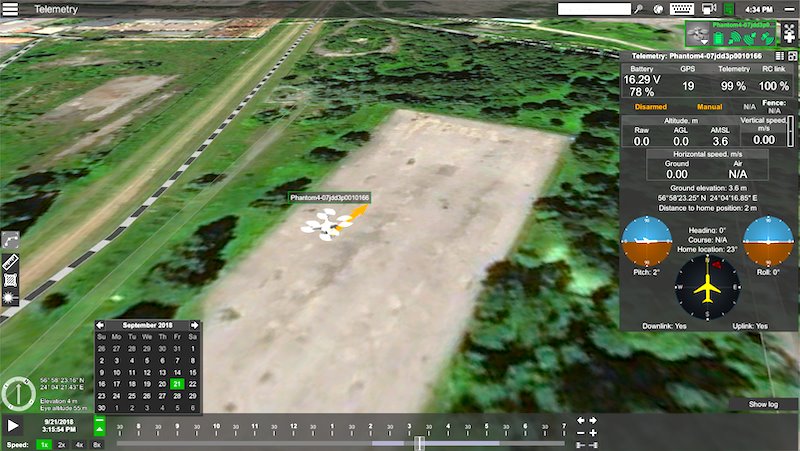
- Entorno inmersivo de planificación de misiones en 3D
- Importación de datos KML / CSV
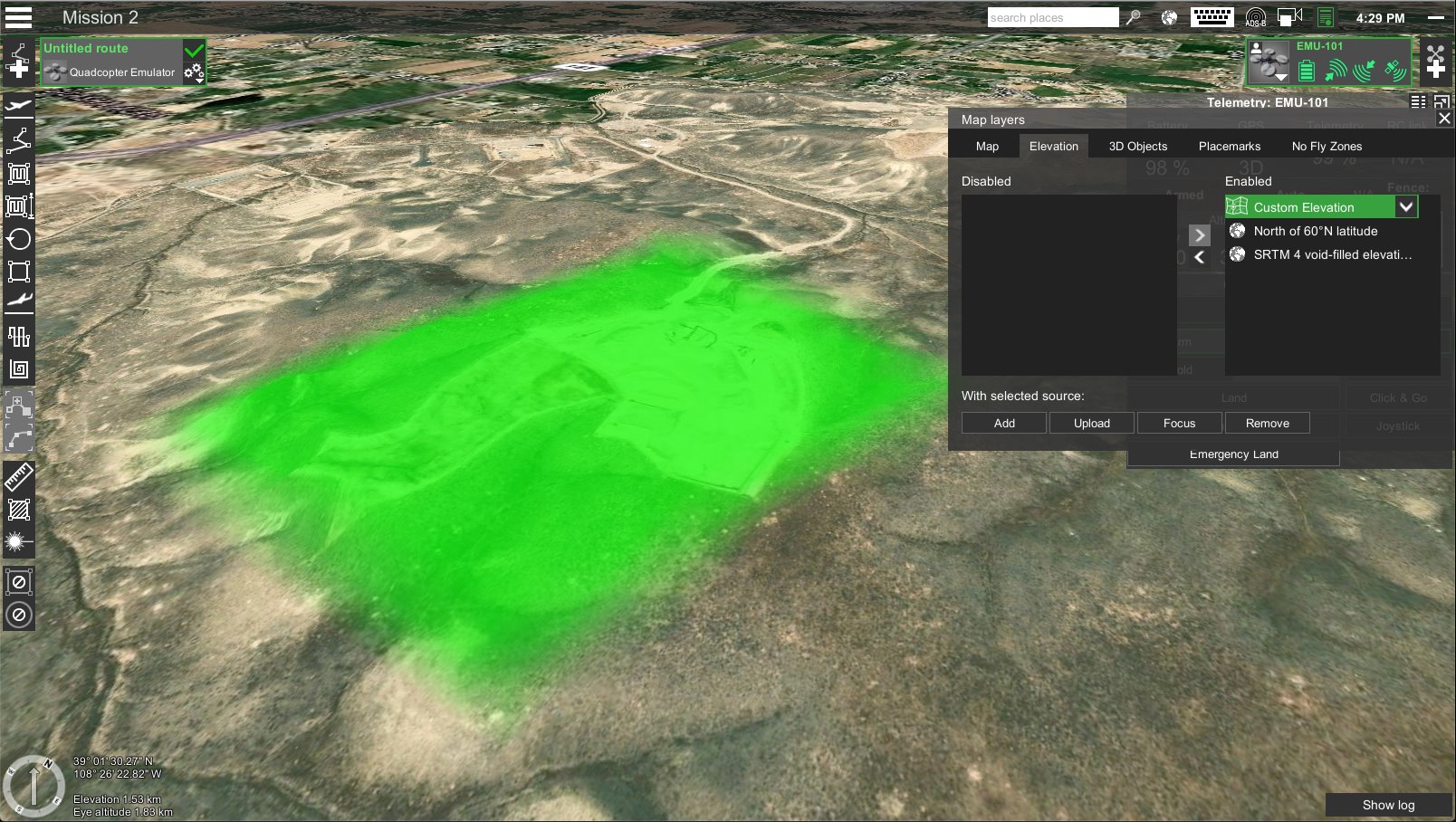
- Importación DEM
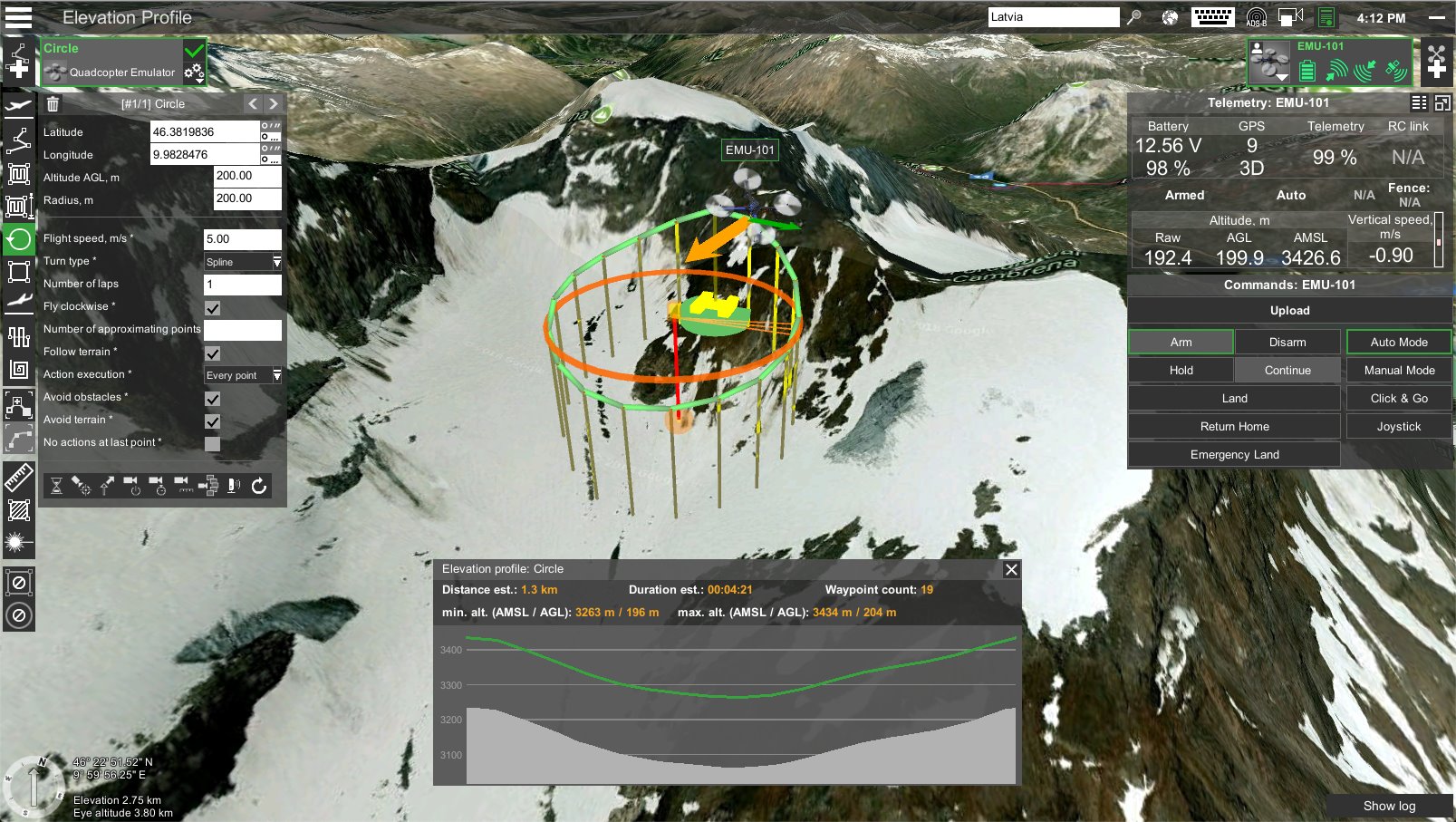
- Perfil de elevación y modo de seguimiento del terreno
- Importación de imágenes georreferenciadas
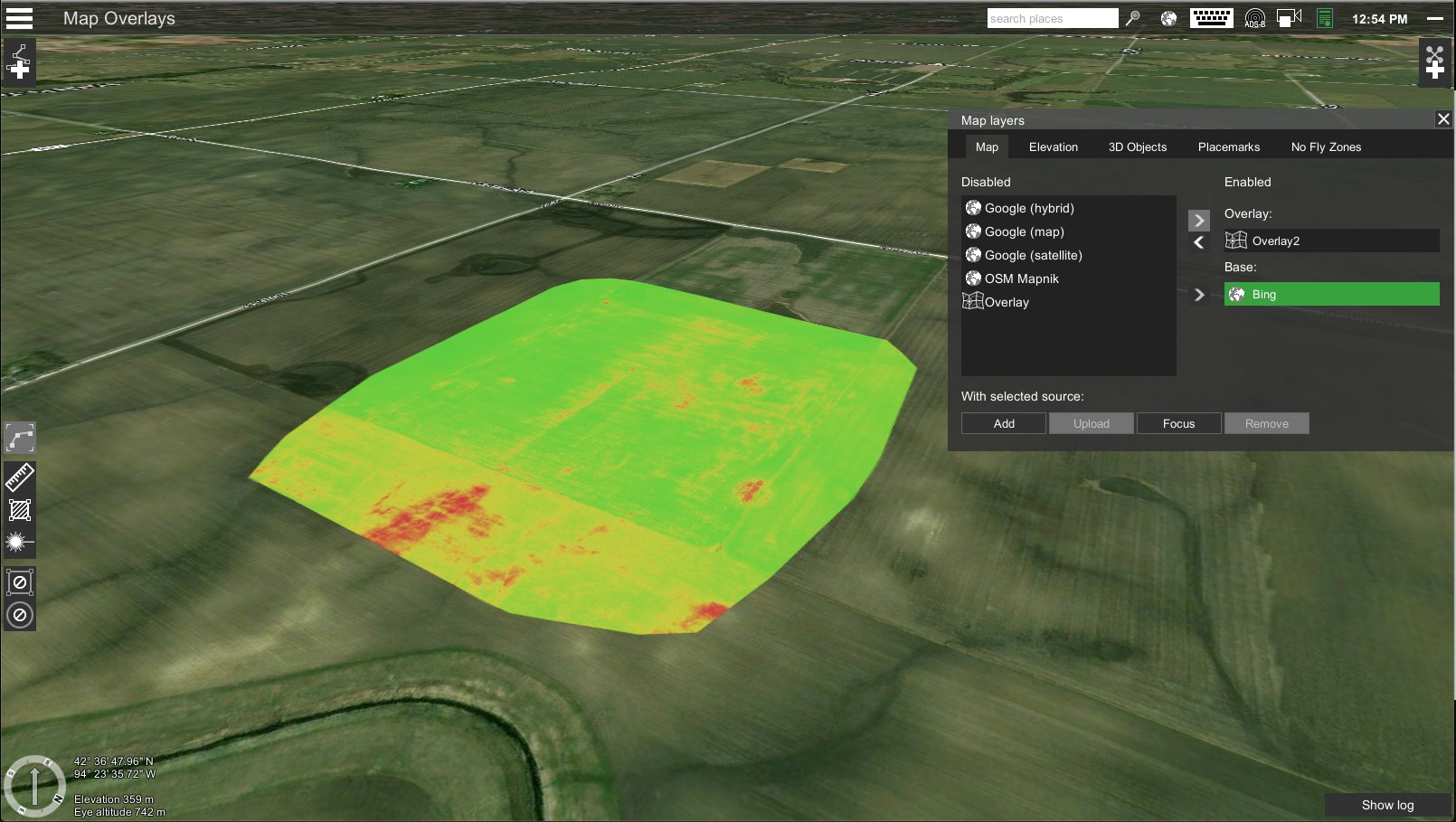
- Superposiciones de mapas personalizados
- Receptor ADS-B
- Transmisión de video
- Compatible con UgCS Mapper para procesar imágenes y crear superposiciones de mapas.
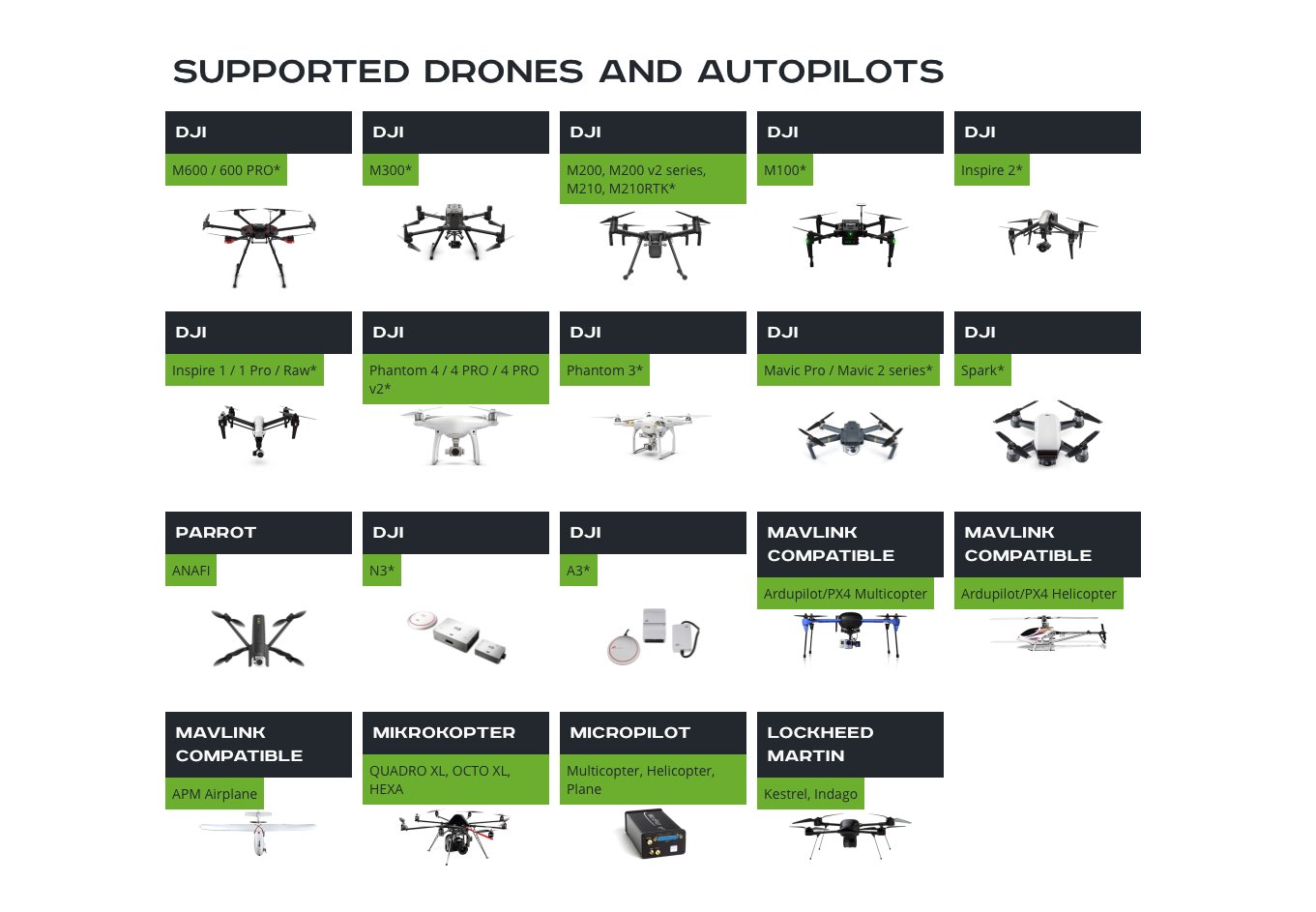
RONES Y PILOTOS AUTOMÁTICOS COMPATIBLES
UgCS admite actualmente

DJI:
Matrice 600/600 Pro
Matrice 200/210 / 210RTK
Matrice 100
Inspire 2
Inspire 1/1 Pro / Raw
Phantom 4 RTK (solo SDK RC)
Phantom 4/4 Pro (excluyendo Agro)
Phantom 3
Mavic Pro / 2 series
Spark
A3 / N3
Matrice 600/600 Pro
Matrice 200/210 / 210RTK
Matrice 100
Inspire 2
Inspire 1/1 Pro / Raw
Phantom 4 RTK (solo SDK RC)
Phantom 4/4 Pro (excluyendo Agro)
Phantom 3
Mavic Pro / 2 series
Spark
A3 / N3
Loro
ANAFI
ANAFI
multirrotor compatibles MAVLink, alas fijas y VTOLs
ArduPilot
Px4
y otra
Mikrokopter
Micropilot
REQUISITOS DEL SISTEMA UGCS
Sistema operativo:
Windows 7 con SP1 o posterior; Windows 8; Windows 10/64 bits
Mac OS X Maverick 10.9 o posterior / 64 bits
Linux: Ubuntu 18.04 LTS / 64 bits
UPC
Core 2 Duo o Athlon X2 a 2,4 GHz
Memoria
RAM recomendada: 4 GB o más
Hardware de gráficos
Tarjeta gráfica compatible con DirectX 9 (modelo de sombreado 2.0). Cualquier tarjeta hecha desde 2004 debería funcionar
Disco duro
2 GB de espacio libre
Resolución de pantalla mínima admitida: 1024×768
Productos relacionados




Productos vistos recientemente

-46%

Agotado
DJI Mavic Air Fly More Combo Blanco
El precio original era: 1.049,00 €.565,00 €El precio actual es: 565,00 €.

-17%

Agotado
DJI OSMO POCKET
El precio original era: 359,00 €.296,66 €El precio actual es: 296,66 €.




{kind=link}